接ベクトル空間
この記事は検証可能な参考文献や出典が全く示されていないか、不十分です。 出典を追加して記事の信頼性向上にご協力ください。(2011年12月) |
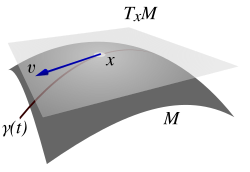
接ベクトル空間 TxM{displaystyle scriptstyle T_{x}M}
 とx∈M{displaystyle scriptstyle xin M}
とx∈M{displaystyle scriptstyle xin M} を通る曲線に沿った接ベクトル v∈TxM{displaystyle scriptstyle vin T_{x}M}
を通る曲線に沿った接ベクトル v∈TxM{displaystyle scriptstyle vin T_{x}M}
多様体上の接ベクトル空間(せつベクトルくうかん、英語:tangent vector space)あるいは 接空間(英語:tangent space)とは、多様体上の各点で定義されるベクトル空間であり、その点における全ての接ベクトルの集合である。接ベクトル空間は、ユークリッド空間内の曲線や曲面における接ベクトルの一般化ともいえる。
目次
1 概要
2 定義
2.1 方向微分
2.2 接ベクトル
3 関数の微分
4 写像の微分
5 関連項目
概要
接ベクトル空間は、多様体上の点ごとに定義されるベクトル空間である。接ベクトル空間の元を接ベクトルという。全ての点で接ベクトルが定まっているとベクトル場というものが定義できる。ベクトル場は多様体の形を調べたり、多様体上の粒子の運動を調べたりするのに非常に役立つ概念である。物理学でいえば電磁場や重力場などを記述でき、そのベクトル場の中に置かれた粒子はその点での接ベクトルの向いている方向に沿って移動していく。本項目で扱うのは、そのベクトル場の基礎となるある 1 点の上の接ベクトル空間である。
1 ≤ r ≤ ∞ とする。 m 次元 Cr 級多様体 M と、その中の Cr 級曲線
- φ :(− ε, ε) → M
を考え φ(0) = p ∈ M とする。
p を含む座標近傍 (U;x1,…,xm) において φ(t) = ( x1(t),…,xm(t)) を t で微分して、 t = 0 を代入することにより曲線 φ の点 p での速度ベクトル
- dϕdt(0):=(dx1dt(0),dx2dt(0)⋯,dxmdt(0)){displaystyle {frac {dphi }{dt}}(0):=left({frac {dx_{1}}{dt}}(0),{frac {dx_{2}}{dt}}(0)cdots ,{frac {dx_{m}}{dt}}(0)right)}

が求まる。 この速度ベクトルの成分は、座標近傍の局所座標系の表し方に依存する表示になっている。多様体の性質を調べる際には、局所座標系の取り方に依存しない性質を扱いたいという要請があるので、この速度ベクトルは多様体の性質を調べるのには不向きである。そこで M 上で定義された Cr 級関数
f:M → R
を利用することを考える。 f は 座標近傍 (U;x1,…,xm) においては、 m 変数の関数 f (x1,…,xm) として書かれている。この f を曲線 φ 上で調べる。 f(φ(t)) は局所座標系に寄らない関数
- f∘ϕ:(−ε,ε)→R{displaystyle fcirc phi :(-varepsilon ,varepsilon )to R}

であり、これを t で微分した
- ddtf∘ϕ(t){displaystyle {frac {d}{dt}}fcirc phi (t)}

もまた局所座標系に依存しない。
ところで f(x1(t),…,xm(t)) という表示にして t で微分してみれば、多変数関数の合成関数の微分 として連鎖律の公式から
- ddtf∘ϕ(0)=∂f∂x1dx1dt(0)+∂f∂x2dx2dt(0)+⋯+∂f∂xndxndt(0){displaystyle {frac {d}{dt}}fcirc phi (0)={frac {partial f}{partial x_{1}}}{frac {dx_{1}}{dt}}(0)+{frac {partial f}{partial x_{2}}}{frac {dx_{2}}{dt}}(0)+cdots +{frac {partial f}{partial x_{n}}}{frac {dx_{n}}{dt}}(0)}

となる。
先程の速度ベクトルの式と比べてみるとこれは、速度ベクトルと f の勾配
- dfdx:=(∂f∂x1(p),∂f∂x2(p),⋯,∂f∂xm(p)){displaystyle {frac {df}{dx}}:=left({frac {partial f}{partial x_{1}}}(p),{frac {partial f}{partial x_{2}}}(p),cdots ,{frac {partial f}{partial x_{m}}}(p)right)}

の内積と見ることができる。
つまり、速度ベクトルと f の勾配を組み合わせることによって、局所座標系に依存しないものが得られることになる。ここで、 f は M 上の Cr 級関数であり、定数関数かもしれないし、 x1 だけを変数にとるといったような必ずしも多様体 M の性質を反映しない関数かもしれないということを考えると先程の式は
- ddtf∘ϕ(0)={dx1dt(0)∂∂x1+dx2dt(0)∂∂x2+⋯+dxmdt(0)∂∂xm}f{displaystyle {frac {d}{dt}}fcirc phi (0)=left{{frac {dx_{1}}{dt}}(0){frac {partial }{partial x_{1}}}+{frac {dx_{2}}{dt}}(0){frac {partial }{partial x_{2}}}+cdots +{frac {dx_{m}}{dt}}(0){frac {partial }{partial x_{m}}}right}f}

のように関数 f とそれに作用する作用素とに分け、この作用素を接ベクトルと定義するのである。
すなわち、局所座標系に依存しない速度ベクトルのようなものを探し求めた結果
- ∑i=1mai∂∂xi{displaystyle sum _{i=1}^{m}a_{i}{frac {partial }{partial x_{i}}}}

という形をした微分作用素の一次結合(接ベクトル)を用いることで解決できる事が分かる。この接ベクトルの全体を接ベクトル空間という。
- 作用素をベクトルと呼ぶために、少し抽象的でわかりにくい話になるが、そういう場合は関数 f に具体的な形をいくつか与えてみて多様体の形を感じ取るのがよい。
定義
方向微分と接ベクトルについての定義を与える。接ベクトルは方向微分であるが、 方向微分が接ベクトルとは限らない。滑らかな多様体の場合にのみ両者は一致するので、滑らかな多様体の話に限るのであれば方向微分の定義は接ベクトルの定義でもある。
方向微分
1 ≤ r ≤ ∞ とする。 m 次元 Cr 級多様体 M と、その中の Cr 級曲線
- φ :(− ε, ε) → M
と M 上の任意の Cr 級関数
f : M → R
を与えたとき、 t0 ∈ (− ε, ε) に対して
- vϕ;:f↦ddtf∘ϕ(t)|t=t0{displaystyle v_{phi ;}:fmapsto {frac {d}{dt}}fcirc phi (t)|_{t=t_{0}}}

という対応 vφ を曲線 φ の t = t0 における方向微分 (directional derivative) という。
- この定義には局所座標系などは全く出てこないので方向微分は座標系に依存しない。
φ(t0) = p ∈ M とする。 p の近傍で定義された任意の Cr 級関数 f,g 及び任意の実数 a,b に対し
vφ(a f + b g) = a vφ(f) + b vφ(g)
vφ(f g) = vφ(f) g(p) + f(p) vφ(g)
が成り立つ。この左辺の変数になっている f g は q ∈ M に対して
f g : q → f(q) g(q)
のように関数の値の(普通の意味での)積とする。
このことから、方向微分 vφ は線型性を持ち、ライプニッツ則(積の微分法則)に従う作用素であることが分かる。
数学においては、このように性質を調べた後でその性質をその言葉の定義と取り替えて一般化することがよくある。
すなわち m 次元 Cr 級多様体 M の点 p の近傍で定義された任意の Cr 級関数 f,g 及び実数 a,b に対し
v(a f + b g) = a v(f) + b v(g)
v(f g) = v(f) g(p) + f(p) v(g)
をみたすような対応
v : f → v(f) ∈ R
のことを p における方向微分という。
- この定義には曲線 φ すら出てこない。
多様体 M 上の点 p における方向微分の全体を Drp(M) と書く。
f = g が恒等的に 1 を取る関数であれば、定義より
v(1*1) = v(1) * 1 + 1 v(1)
v(1) = 0
となる。このことより f が定数 a を取る定数関数であれば
v(a) = v(a*1) = a v(1) = 0
となることがわかる。
p の開近傍を十分小さく取ったときに Cr 級関数 f,g の値がその開近傍上で等しいとき
v(f) - v(g) = v(f − g) = v(0) = 0
v(f) = v(g)
となる。
p ∈ M での方向微分 u,v と Cr 級関数 f 実数 a に対して
- (u + v)(f) = u(f) + v(f)
- (a u)(f) = a (u(f))
のように、方向微分の和と定数倍を定義することにより、 Drp(M) はベクトル空間になる。
接ベクトル
1 ≤ r ≤ ∞ とする。 m 次元 Cr 級多様体 M とその上の点 p を考える。 p を含む座標近傍 (U;x1,…,xm) 上で定義された微分作用素
- (∂∂xi)p,1≤i≤m{displaystyle left({frac {partial }{partial x_{i}}}right)_{p},1leq ileq m}

は方向微分になる。この m 個の方向微分は線型独立であり、これらの線型結合
- ∑i=1mai(∂∂xi)p{displaystyle sum _{i=1}^{m}a_{i}left({frac {partial }{partial x_{i}}}right)_{p}}
- (ただし ai ∈ R (1 ≤ i ≤ m) )

を、 p における M の接ベクトル (tangent vector) といい、接ベクトルの全体を Tp(M) と書き、 p における M の接ベクトル空間 (tangent vector space) あるいは 接空間 (tangent space) という。接ベクトル空間 Tp(M) は Drp(M) の線型部分空間である。
Tp(M) ⊆ Drp(M)
この等号が成り立つのは、 M が C∞ 級多様体(滑らかな多様体)であるときに限る。
接ベクトルの定義において、係数 {ai ∈ R} をどのような組み合わせでとってもその接ベクトルに対する p を通る曲線 φ が存在する。逆に p を通る Cr 曲線 φ に対して定められた方向微分 vφ は接ベクトルになる。
見かけは局所座標系に依存しているように見える定義も、局所座標に依存しないベクトルとして定まっている。 p を含む別の座標近傍 (V;y1,…,ym) を取り、座標変換を考え
- (∂∂xi)p=∑j=1m∂yj∂xi(p)(∂∂yj)p{displaystyle left({frac {partial }{partial x_{i}}}right)_{p}=sum _{j=1}^{m}{frac {partial y_{j}}{partial x_{i}}}(p)left({frac {partial }{partial y_{j}}}right)_{p}}

を用いれば、接ベクトルは
- ∑i=1mai(∂∂xi)p=∑i=1mai{∑j=1m∂yj∂xi(p)(∂∂yj)p}=∑j=1m{∑i=1mai∂yj∂xi(p)}(∂∂yj)p{displaystyle sum _{i=1}^{m}a_{i}left({frac {partial }{partial x_{i}}}right)_{p}=sum _{i=1}^{m}a_{i}left{sum _{j=1}^{m}{frac {partial y_{j}}{partial x_{i}}}(p)left({frac {partial }{partial y_{j}}}right)_{p}right}=sum _{j=1}^{m}left{sum _{i=1}^{m}a_{i}{frac {partial y_{j}}{partial x_{i}}}(p)right}left({frac {partial }{partial y_{j}}}right)_{p}}

という計算によって
- ∑i=1mbi(∂∂yi)p{displaystyle sum _{i=1}^{m}b_{i}left({frac {partial }{partial y_{i}}}right)_{p}}
- (ただし bi ∈ R (1 ≤ i ≤ m) )

の形に変換できる。
関数の微分
m 次元 Cr 級多様体 M とその上の点 p を考える。 p における 接ベクトル v は、 p の近傍で定義された Cr 級関数 f を実数 v(f) に対応させる関数である。
v : f → v(f) ∈ R
v(f) は接ベクトル v と関数 f の組であり、 v を固定して、 f に対して値が定まると考えてきた。逆に f を固定して
dfp : v → v(f)
という関数も考えることができる。この dfp を f の p における 微分 (differential) という。
接ベクトルのなす空間 Tp(M) は R 上の線型空間であることから、 Tp(M) から R への線型写像のなす双対ベクトル空間
Tp*(M) = HomR( Tp(M) , R)
が定まるが、 微分 dfp はこの Tp*(M) の元である。 Tp*(M) のことを M の p における余接ベクトル空間 (cotangent vector space) という。
特に p を含む座標近傍 (U;x1,…,xm) があるとき、関数 f として 局所座標系の成分の一つである xk を選べば、その p における微分は (dxk)p となり
- (dxi)p(∂∂xj)p=δij,1≤i,j≤m{displaystyle left(dx_{i}right)_{p}left({partial over partial x_{j}}right)_{p}=delta _{ij},1leq i,jleq m}

である。右辺の δij はクロネッカーのデルタとする。
- ここに現れた dxk という記号は、微分形式として積分 ∫ f(x) dx に現れる dx と、しばしば同一視される。通常の積分では∫と dx は、一組の記号でありそれぞれを別個の物として扱うことはできないが、各点で余接ベクトルとみなせば、 dx という記号に意味を持たせることができる。各点に余接ベクトルを与えたものであるので、正確には余接ベクトル場を考えることになる。
写像の微分
多様体上の関数の微分は、多様体から多様体への写像の微分へと拡張される。
M:a 次元 Cr 級多様体
N:b 次元 Cr 級多様体
として、Cr 級写像
- f: M1 → M2
を考える。
M の中の曲線
- φ :(− ε, ε) → M
- φ(0) = p ∈ M
をとり、 p を含む座標近傍 (U;x1,…,xa) を取る。
曲線 φ の t = 0 における接ベクトルは
- vϕ=∑i=1adxidt∂∂xi{displaystyle v_{phi }=sum _{i=1}^{a}{frac {dx_{i}}{dt}}{frac {partial }{partial x_{i}}}}

と書ける。
ここで φ を f で N の中へ写した曲線
- f∘ϕ:(−ε,ε)→N{displaystyle fcirc phi :(-varepsilon ,varepsilon )to N}
- f(φ(0)) = q ∈ N

と、 q を含む座標近傍 (V;y1,…,yb) を取る。同様に t = 0 における接ベクトルは
- vf∘ϕ=∑j=1bdyjdt∂∂yj{displaystyle v_{fcirc phi }=sum _{j=1}^{b}{frac {dy_{j}}{dt}}{frac {partial }{partial y_{j}}}}

となる。この接ベクトルの係数は、 M の局所座標系を用いると合成関数の微分により
- dyjdt(0)=∑i=1a∂yj∂xidxidt(0){displaystyle {frac {dy_{j}}{dt}}(0)=sum _{i=1}^{a}{frac {partial y_{j}}{partial x_{i}}}{frac {dx_{i}}{dt}}(0)}

となることが分かる。行列を用いて書くと
- (dy1dt⋮dybdt)=(∂y1∂x1⋯∂y1∂xa⋮⋱⋮∂yb∂x1⋯∂yb∂xa)(dx1dt⋮dxadt){displaystyle {begin{pmatrix}{cfrac {dy_{1}}{dt}}\vdots \{cfrac {dy_{b}}{dt}}\end{pmatrix}}={begin{pmatrix}{cfrac {partial y_{1}}{partial x_{1}}}&cdots &{cfrac {partial y_{1}}{partial x_{a}}}\vdots &ddots &vdots \{cfrac {partial y_{b}}{partial x_{1}}}&cdots &{cfrac {partial y_{b}}{partial x_{a}}}\end{pmatrix}}{begin{pmatrix}{cfrac {dx_{1}}{dt}}\vdots \{cfrac {dx_{a}}{dt}}\end{pmatrix}}}

となる。右辺の b × a 行列
- Jf:=(∂y1∂x1⋯∂y1∂xa⋮⋱⋮∂yb∂x1⋯∂yb∂xa){displaystyle J_{f}:={begin{pmatrix}{cfrac {partial y_{1}}{partial x_{1}}}&cdots &{cfrac {partial y_{1}}{partial x_{a}}}\vdots &ddots &vdots \{cfrac {partial y_{b}}{partial x_{1}}}&cdots &{cfrac {partial y_{b}}{partial x_{a}}}\end{pmatrix}}}

は関数行列(ヤコビ行列)である。それぞれの接ベクトルは p や q の周辺の様子を表しているが、 p の周辺が f によってどのように q の周辺にうつされているのか?を表現しているのが、この関数行列 Jfである。
こうして
- (df)p : Tp(M) → Tq(N)
という対応ができ、この (df)p を
f : M → N
の p における微分という。つまり、微分というのは接ベクトル空間から接ベクトル空間への線型写像のことであり、微分を用いることによって写像は局所的には線型代数学的な扱いが可能になる。
(df)p の行列としての表示 Jf の階数を f の p における階数(rank) といい、 rankp(f) と書くと
rankp(f) ≤ min(a,b)
である。
関連項目
- 多様体
- 接線
- 接平面


